|
Yuxin Cai Hi there! I’m a Ph.D. student in the Automated Driving and Human-Machine System Lab (AutoMan) at Nanyang Technological University (NTU), where I’m advised by Prof. Chen Lv. I’m also an AGS scholar in the Robotics and Autonomous Systems department, co-supervised by Dr. Wei-Yun Yau at the Institute for Infocomm Research (I²R), A*STAR. Before starting my Ph.D., I completed my B.Eng. (Hons) in Mechanical Engineering at NTU, where I specialized in Robotics and Mechatronics. My research interests lie in robot learning, with an emphasis on generalization across diverse tasks and environments. I am particularly interested in how agents can acquire transferable and scalable policies that remain robust under distribution shifts, unseen task variations, and dynamic multi-agent settings. My recent work focuses on leveraging foundation models and structured reasoning to improve real-world robot navigation and decision-making, particularly in vision-language tasks and zero-shot generalization. |

|
News
2025.11 We won the Best Paper Award (First Prize) for our paper "COVLM-RL" at IEEE ITSC 2025!
|
Cool Demos |
Scalable Autonomy StackA full autonomy stack supporting both slow and fast walking/running modes across different robotic platforms. The system integrates real-time mapping, path planning, terrain analysis, and collision avoidance to enable smooth goal-directed navigation in real-world environments while maintaining stable forward motion during turns. This demo provides a practical platform for deploying and evaluating high-level vision-language navigation (VLN) policies on legged robots. More details can be found in here. |
||
|
Publications |
|
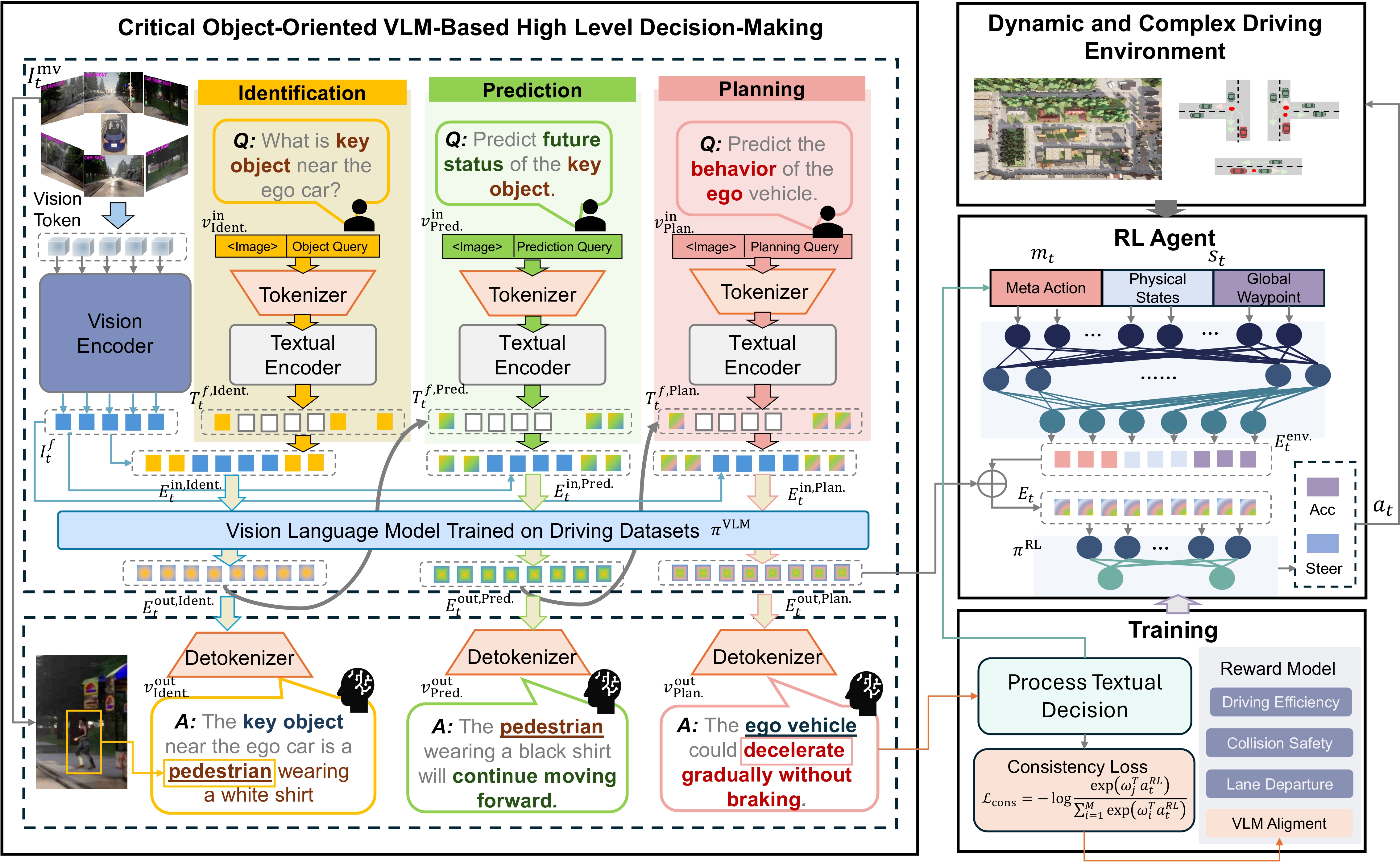
COVLM-RL: Critical Object-Oriented Reasoning for Autonomous Driving Using VLM-Guided Reinforcement Learning
Lin Li, Yuxin Cai, Jianwu Fang, Jianru Xue, Chen Lv IEEE 28th International Conference on Intelligent Transportation Systems (ITSC), 2025 (Best Paper Awards - First Prize) COVLM-RL integrates Critical Object reasoning with VLM-guided RL to generate semantic driving priors and align them with low-level control. It improves training stability, interpretability, and boosts CARLA success rates by 30% in trained and 50% in unseen environments. |
|
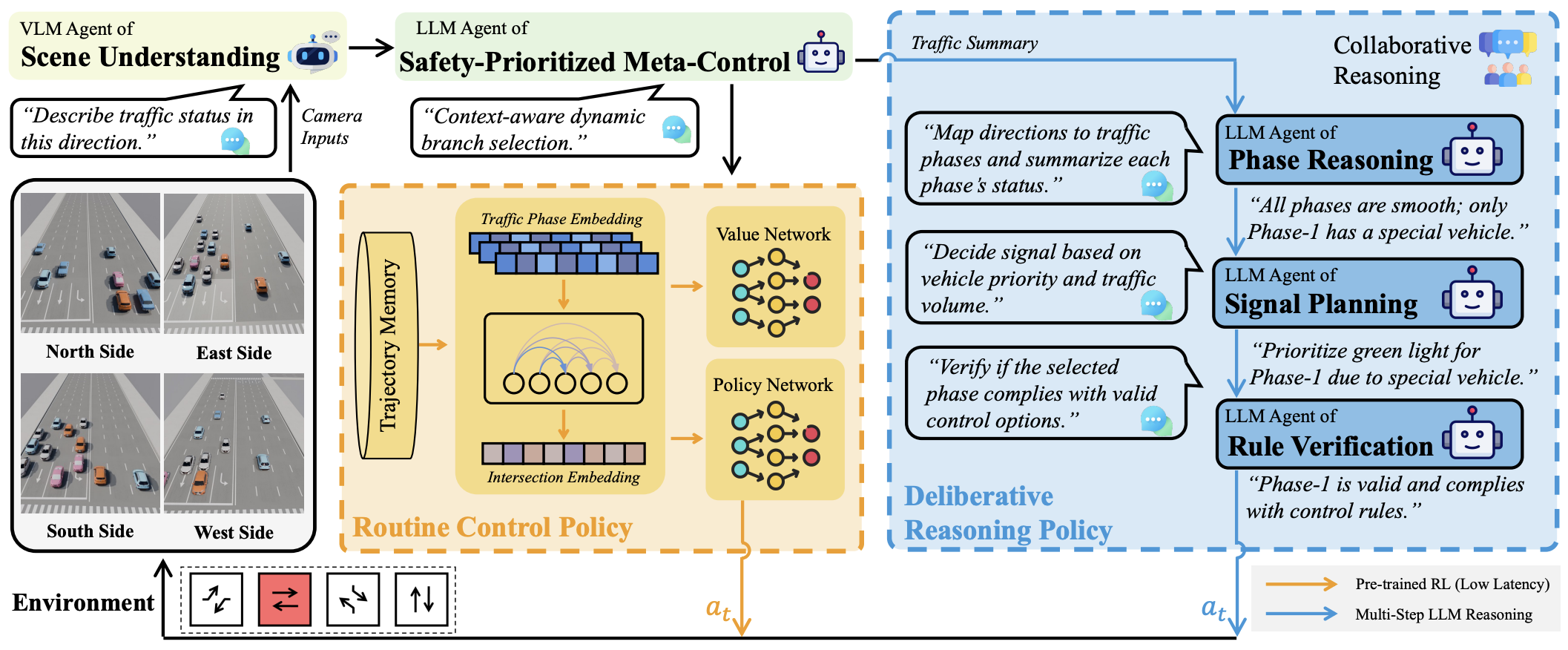
VLMLight: Traffic Signal Control via Vision-Language Meta-Control and Dual-Branch Reasoning
Maonan Wang, Yirong Chen, Yuxin Cai, Chung Shue Chen, Yuheng Kan, Man-On Pun The Thirty-Ninth Annual Conference on Neural Information Processing Systems (NeurIPS), 2025 VLMLight is a vision-language-based traffic signal control (TSC) framework that leverages a safety-aware LLM meta-controller to dynamically switch between a fast RL policy and a structured reasoning branch. It introduces the first image-based traffic simulator with multi-view intersection perception, enabling real-time decision-making for both routine and critical scenarios. Experiments demonstrate up to 65% improvement in emergency vehicle response over RL-only systems. |
|
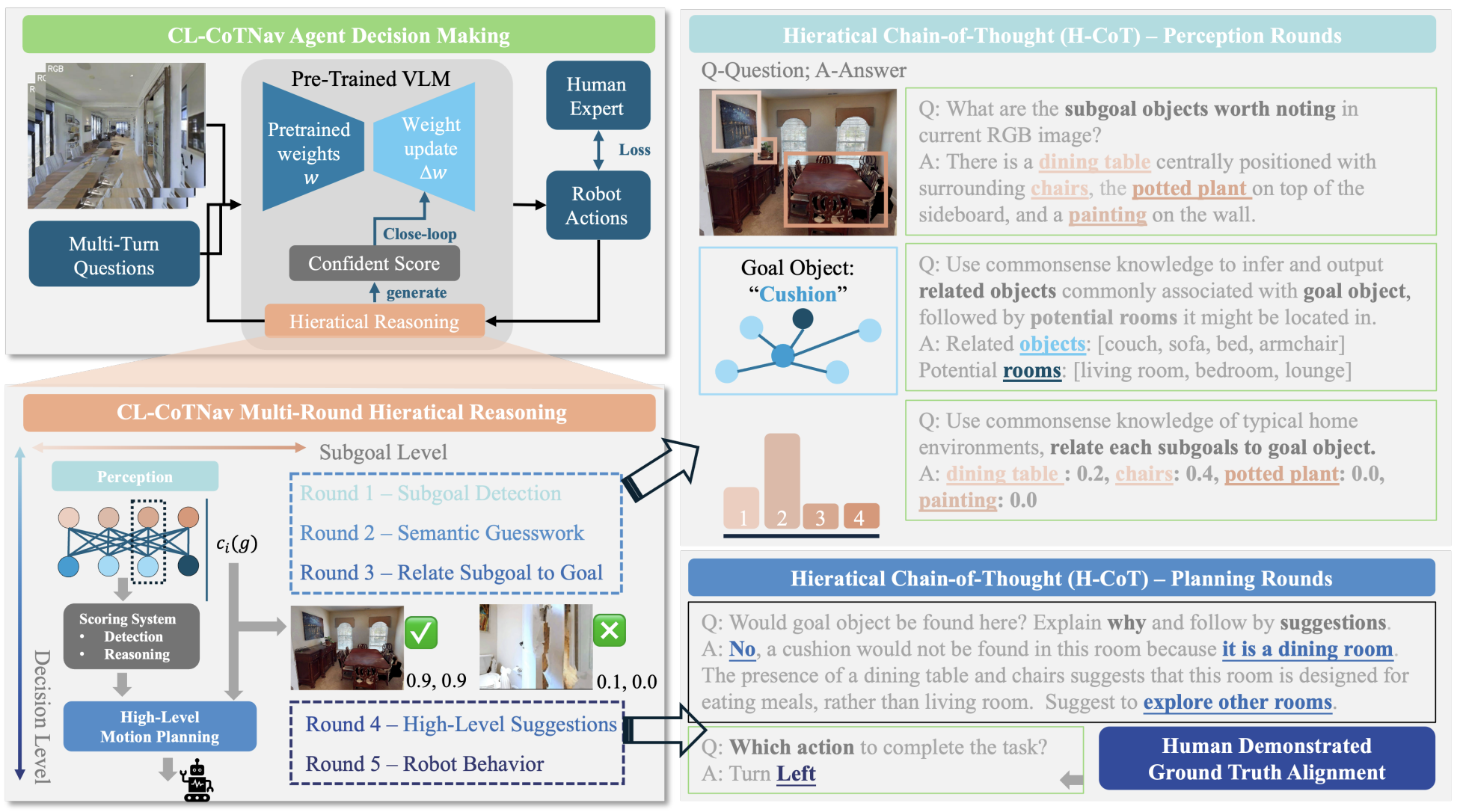
CL-CoTNav: Closed-Loop Hierarchical Chain-of-Thought for Zero-Shot Object-Goal Navigation with Vision-Language Models
Yuxin Cai, Xiangkun He, Maonan Wang, Hongliang Guo, Wei-Yun Yau, Chen Lv Workshop on Learned Robot Representations (RoboReps), RSS 2025 A vision-language model (VLM)-driven framework that integrates structured chain-of-thought reasoning and closed-loop feedback to enable zero-shot generalization in object navigation tasks. |
|
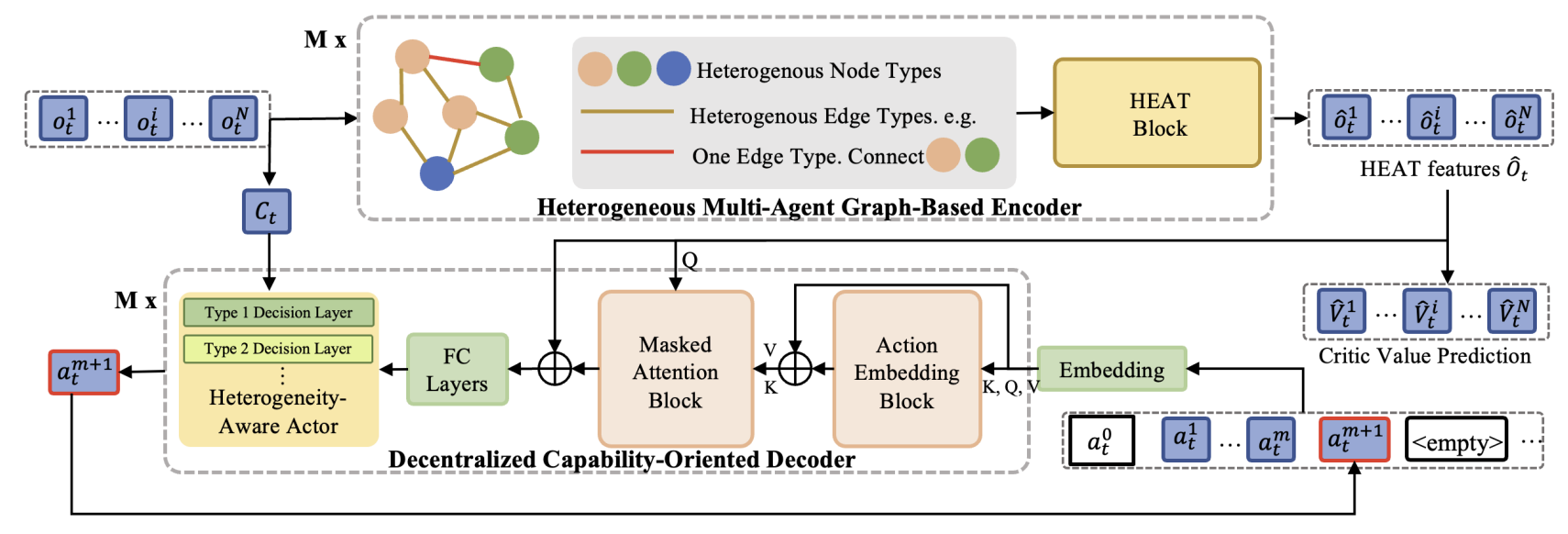
Transformer-based Multi-Agent Reinforcement Learning for Generalization of Heterogeneous Multi-Robot Cooperation
Yuxin Cai, Xiangkun He, Hongliang Guo, Wei-Yun Yau, Chen Lv IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 (Oral Presentation) We propose a novel transformer-based multi-agent reinforcement learning framework that enables generalizable and cooperative behavior among heterogeneous robot teams across diverse task settings. |
|
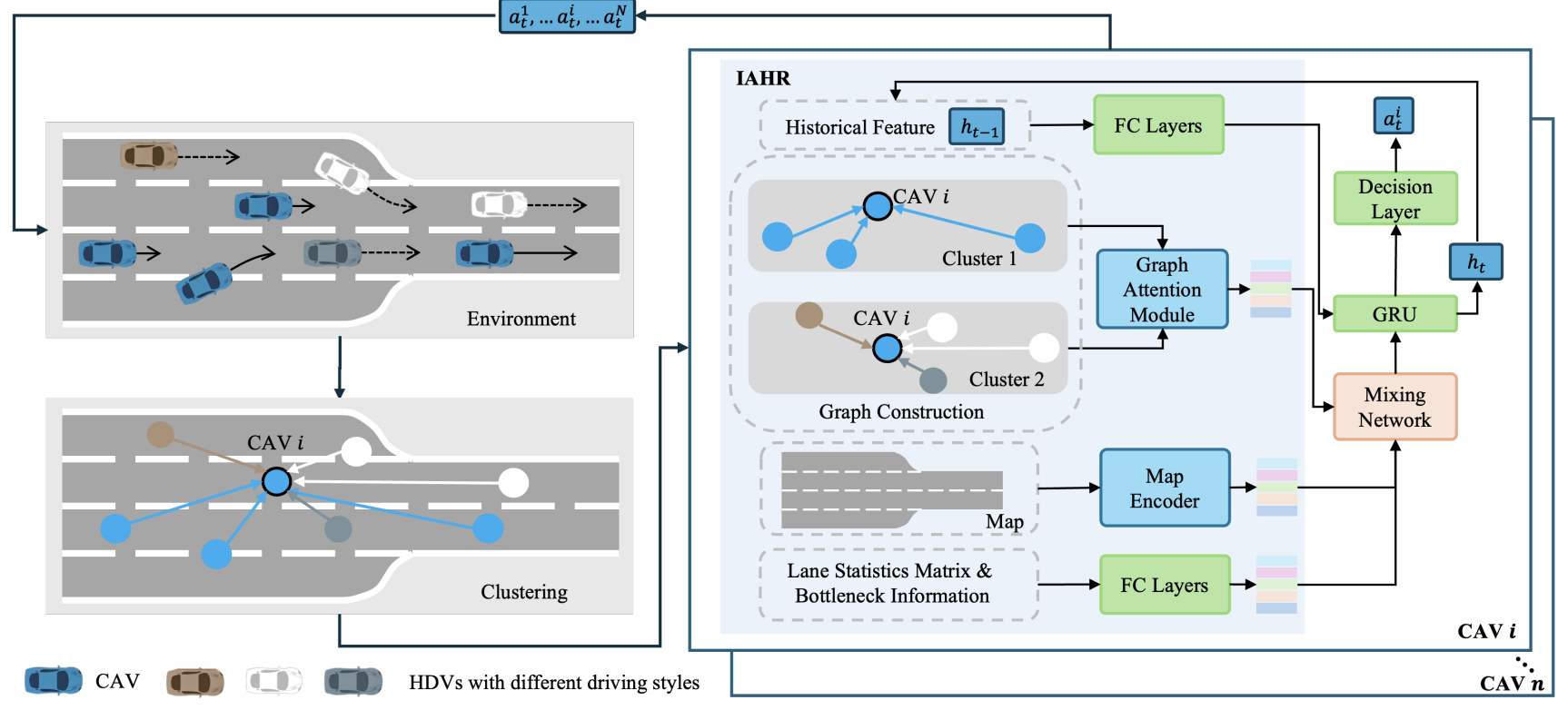
Interaction-Aware Hierarchical Representation of Multi-Vehicle Reinforcement Learning for Cooperative Control in Dense Mixed Traffic
Yuxin Cai, Zhengxuan Liu, Xiangkun He, Zhiqiang Zuo, Wei-Yun Yau, Chen Lv IEEE Intelligent Transportation Systems Conference (ITSC), 2024 (Oral Presentation) We introduce a hierarchical multi-agent reinforcement learning framework that models both inter-vehicle interactions and traffic-level dynamics to achieve robust and cooperative control for autonomous vehicles in dense, heterogeneous traffic scenarios. |
|
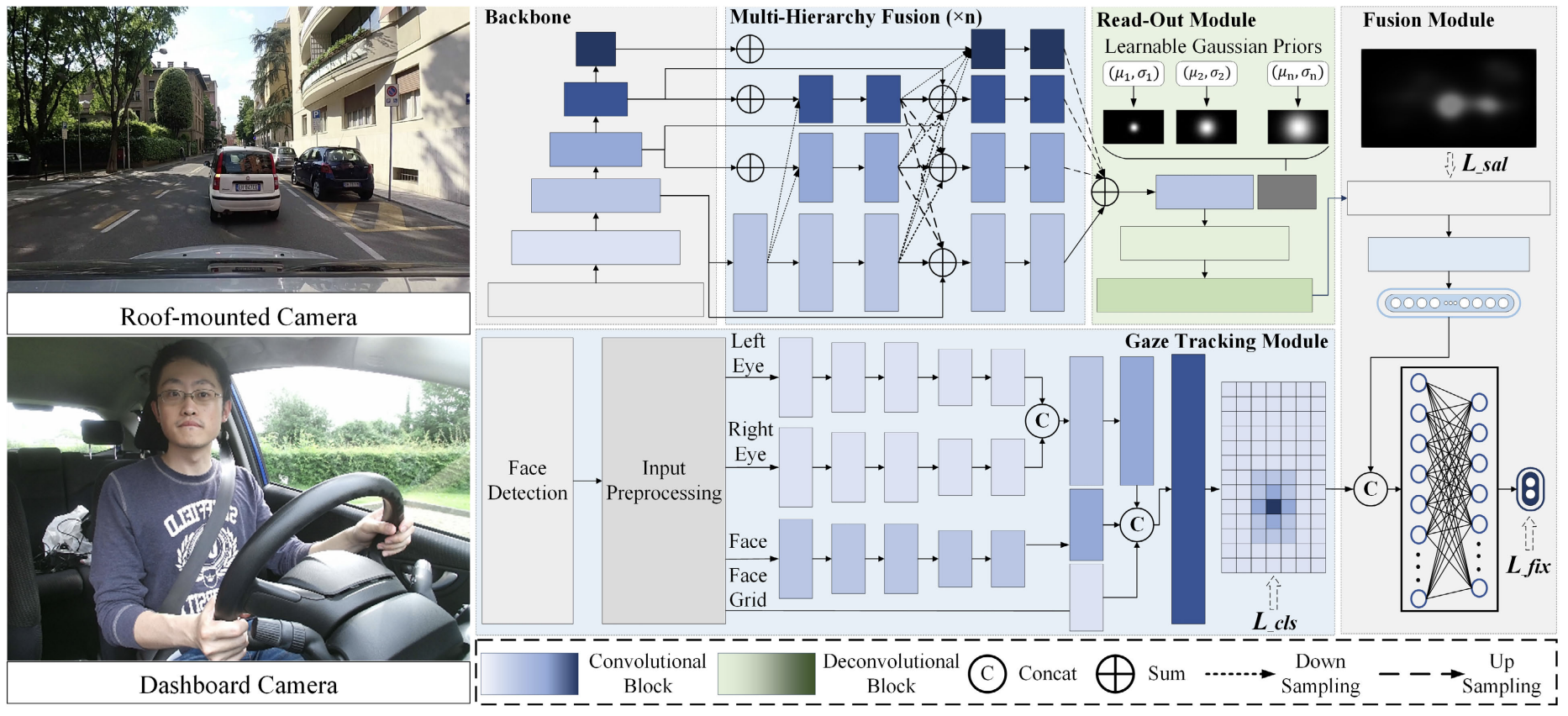
Context-Aware Driver Attention Estimation Using Multi-Hierarchy Saliency Fusion With Gaze Tracking
Zhongxu Hu, Yuxin Cai, Qinghua Li, Kui Su, Chen Lv IEEE Transactions on Intelligent Transportation Systems (T-ITS), 2024 We propose a context-aware driver attention estimation framework that fuses gaze tracking, saliency detection, and semantic scene understanding across multiple hierarchical levels to improve prediction accuracy in real-world driving scenarios. |
Academic Services |
Journal Reviewer
Conference Reviewer
|
Visitor Map |
|
Website template from Jon Barron, jonbarron.com. |